2016年に北里大学と共同で行った実証実験結果をフィードバックした「体操評価付き健康啓発ロボットシステム」を、医療機関向けに12月より販売します。本システムには同学の高平尚伸教授考案のアルゴリズムを使用し、システムに組み込んでいます。
また同大学とは引き続き、神奈川県のさがみロボット産業特区の2017年のロボット実証実験支援事業として「健康管理・健康啓発アプリ連動ロボットシステム(在宅向けのロボットシステム)」の実証実験を行っており、病院および在宅の両方でのロボットの活用による健康啓発ソリューションを共同で開発しています。
ロボットと共に未来をみる株式会社シャンティ(本社:東京都目黒区、代表取締役:稲垣幹矢)は12月1日(金)、体操評価付き健康啓発ロボットシステムの提供を開始します。医学的な視点で捉えた体操を検出して実施者にフィードバックする、初めての生活支援ロボット「Pepper(ペッパー)」でのソリューションです。

▼ 「体操評価付き健康啓発ロボットシステム」の実証実験(北里大学病院)の様子のニュース記事
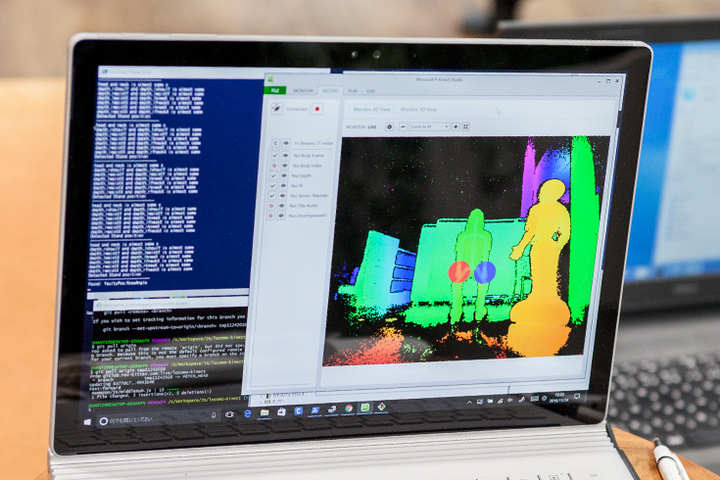
https://robotstart.info/2016/12/14/kita-shant-sys.html■3D映像を撮影するKinectセンサーを利用、運動実施状況を評価
今回の提供は、2016年11月24日に北里大学病院(神奈川県相模原市)で行われた「体操評価付き健康啓発ロボットシステム」の実証実験の結果をフィードバックし、医療機関向けに販売を開始するものです。
実証実験で使用されたロボットはソフトバンクロボティクスの「Pepper」と小型の二足歩行型ロボット「NAO(ナオ)」。開発には北里大学医療衛生学部教授で、整形外科医の高平尚伸教授考案、特許(特許番号 第6056107号)を取得したアルゴリズムが使用され、弊社がロボットシステムとして組み込みました。
同教授の監修を受けた合理的、論理的運動評価を持ったロボットシステムは、他のシステムと一線を画していると言えるでしょう。また、Pepper単体で運動を指導するアプリケーションはありますが、3D映像を撮影するKinectセンサーを利用してのユーザーの運動実施状況を評価する仕組みとして、商用化される始めてのアプリケーションとなります。
また、弊社では北里大学と協力して健康啓発ロボットの開発を継続中です。株式会社シャープが提供するモバイル型ロボット電話「RoBoHoN(ロボホン)」を活用した「健康管理・健康啓発アプリ連動ロボットシステム」を、神奈川県のさがみロボット産業特区の実証実験として10月31日から在宅で高齢者の方に行なっていただいています。

在宅での運動習慣化ロボットとの連動により、病院及び在宅でのデータを共有し、医師に対して客観的な運動データを提供できるシステムにアップデートしていく予定です。
■提供される機能
(1)生活支援ロボットPepperによる問診
Pepperが口頭で質問した内容に体験者がタブレットで回答。アンケート結果からロコモティブシンドローム予備軍かどうかを判定(簡易診断)。
※ロコモティブシンドローム:骨や関節、筋肉、神経等が衰えて「立つ」「歩く」といった動作が困難となり、要介護や寝たきりになってしまう、あるいはそのリスクが高い状態。
(2)ロコモティブシンドローム予防体操「ロコトレ」の提案
ロコモティブシンドローム予備軍と判定された場合、Pepperが体験者に「ロコトレ」を提案。スクワットと片脚立ちをタブレットに表示された動画に沿って行う。その動きをセンサーが測定し、足のついているNAOが効果的で正しい姿勢で体操を行うための体操を一緒に行う。
(3)3D映像で撮影、動作の解析とアドバイス
体験者の姿勢をKinectセンサーが3D映像で撮影し、画像を高平教授考案のアルゴリズム(特許番号 第6056107号)とディープラーニングで機械学習したシステムが解析。正しい姿勢でできていればチャイムで知らせる。改善が必要な場合は、正しい体操の方法をNAOがアドバイス。
<高平尚伸(たかひら・なおのぶ)>
1964年生まれ。1989年、北里大学医学部医学科卒業。現北里大学医療衛生学部教授、北里大学病院整形外科医、医学博士。研究分野は整形外科学、リハビリテーション科学・福祉工学、スポーツ医学、応用健康科学、医用生体工学・生体材料学。また、専門は股関節の疾患、運動器リハビリテーション、ロコモティブシンドローム、エコノミークラス症候群・静脈血栓塞栓症、姿勢など。
【株式会社シャンティについて】
本社:〒153-0064 東京都目黒区下目黒5-26-11
代表者:代表取締役 稲垣幹矢
設立:2015年10月
電話番号:03-6873-6419
URL:
http://shanti-robo.co.jp事業内容:
・ロボットに関連した科学研究、開発
・医院に関わるサービス
・ロボットやAIを組み合わせたサービスのコンサルティング
【一般の方向けのお問い合わせ先】
企業名:株式会社シャンティ
担当者名:山下
TEL:03-?6873-6419
Email:info@shanti-robo.co.jp
提供元:
ValuePress!プレスリリース詳細へ





2016年に北里大学と共同で行った実証実験結果をフィードバックした「体操評価付き健康啓発ロボットシステム」を、医療機関向けに12月より販売します。本システムには同学の高平尚伸教授考案のアルゴリズムを使用し、システムに組み込んでいます。
また同大学とは引き続き、神奈川県のさがみロボット産業特区の2017年のロボット実証実験支援事業として「健康管理・健康啓発アプリ連動ロボットシステム(在宅向けのロボットシステム)」の実証実験を行っており、病院および在宅の両方でのロボットの活用による健康啓発ソリューションを共同で開発しています。
ロボットと共に未来をみる株式会社シャンティ(本社:東京都目黒区、代表取締役:稲垣幹矢)は12月1日(金)、体操評価付き健康啓発ロボットシステムの提供を開始します。医学的な視点で捉えた体操を検出して実施者にフィードバックする、初めての生活支援ロボット「Pepper(ペッパー)」でのソリューションです。
▼ 「体操評価付き健康啓発ロボットシステム」の実証実験(北里大学病院)の様子のニュース記事
https://robotstart.info/2016/12/14/kita-shant-sys.html
■3D映像を撮影するKinectセンサーを利用、運動実施状況を評価
今回の提供は、2016年11月24日に北里大学病院(神奈川県相模原市)で行われた「体操評価付き健康啓発ロボットシステム」の実証実験の結果をフィードバックし、医療機関向けに販売を開始するものです。
実証実験で使用されたロボットはソフトバンクロボティクスの「Pepper」と小型の二足歩行型ロボット「NAO(ナオ)」。開発には北里大学医療衛生学部教授で、整形外科医の高平尚伸教授考案、特許(特許番号 第6056107号)を取得したアルゴリズムが使用され、弊社がロボットシステムとして組み込みました。
同教授の監修を受けた合理的、論理的運動評価を持ったロボットシステムは、他のシステムと一線を画していると言えるでしょう。また、Pepper単体で運動を指導するアプリケーションはありますが、3D映像を撮影するKinectセンサーを利用してのユーザーの運動実施状況を評価する仕組みとして、商用化される始めてのアプリケーションとなります。
また、弊社では北里大学と協力して健康啓発ロボットの開発を継続中です。株式会社シャープが提供するモバイル型ロボット電話「RoBoHoN(ロボホン)」を活用した「健康管理・健康啓発アプリ連動ロボットシステム」を、神奈川県のさがみロボット産業特区の実証実験として10月31日から在宅で高齢者の方に行なっていただいています。
在宅での運動習慣化ロボットとの連動により、病院及び在宅でのデータを共有し、医師に対して客観的な運動データを提供できるシステムにアップデートしていく予定です。
■提供される機能
(1)生活支援ロボットPepperによる問診
Pepperが口頭で質問した内容に体験者がタブレットで回答。アンケート結果からロコモティブシンドローム予備軍かどうかを判定(簡易診断)。
※ロコモティブシンドローム:骨や関節、筋肉、神経等が衰えて「立つ」「歩く」といった動作が困難となり、要介護や寝たきりになってしまう、あるいはそのリスクが高い状態。
(2)ロコモティブシンドローム予防体操「ロコトレ」の提案
ロコモティブシンドローム予備軍と判定された場合、Pepperが体験者に「ロコトレ」を提案。スクワットと片脚立ちをタブレットに表示された動画に沿って行う。その動きをセンサーが測定し、足のついているNAOが効果的で正しい姿勢で体操を行うための体操を一緒に行う。
(3)3D映像で撮影、動作の解析とアドバイス
体験者の姿勢をKinectセンサーが3D映像で撮影し、画像を高平教授考案のアルゴリズム(特許番号 第6056107号)とディープラーニングで機械学習したシステムが解析。正しい姿勢でできていればチャイムで知らせる。改善が必要な場合は、正しい体操の方法をNAOがアドバイス。
<高平尚伸(たかひら・なおのぶ)>
1964年生まれ。1989年、北里大学医学部医学科卒業。現北里大学医療衛生学部教授、北里大学病院整形外科医、医学博士。研究分野は整形外科学、リハビリテーション科学・福祉工学、スポーツ医学、応用健康科学、医用生体工学・生体材料学。また、専門は股関節の疾患、運動器リハビリテーション、ロコモティブシンドローム、エコノミークラス症候群・静脈血栓塞栓症、姿勢など。
【株式会社シャンティについて】
本社:〒153-0064 東京都目黒区下目黒5-26-11
代表者:代表取締役 稲垣幹矢
設立:2015年10月
電話番号:03-6873-6419
URL:http://shanti-robo.co.jp
事業内容:
・ロボットに関連した科学研究、開発
・医院に関わるサービス
・ロボットやAIを組み合わせたサービスのコンサルティング
【一般の方向けのお問い合わせ先】
企業名:株式会社シャンティ
担当者名:山下
TEL:03-?6873-6419
Email:info@shanti-robo.co.jp
提供元:ValuePress!プレスリリース詳細へ